Mon premier robot wifi
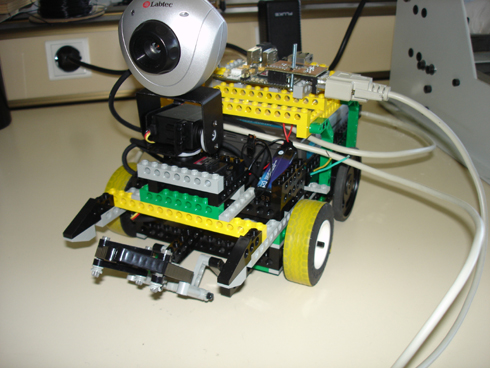
Voilà des années que je rêve de créer mon propre robot, j'ai enfin franchi le pas ! Je développe, depuis Février dernier et avec un autre étudiant, un robot wifi commandé par wiimote doté d'une caméra 360° pour retransmettre ce que voit le robot dans les moindres recoins. Nous utilisons une carte fox pour le coeur du robot et une carte SSC-32 pour le contrôle des servomoteurs. Le tout relié en wifi à un PC débarqué qui s'occupe de l'envoi des commandes au robot. Une manette de wii étant reliée au PC en bluetooth pour commander le robot. Je profite donc de ce premier article pour présenter un peu ce projet, qui sera j'espère, le premier de tout une lignée.
J'avais la possibilité de travailler sur un projet libre sur les systèmes embarqués dans le cadre de mes études. J'ai sauté sur l'occasion pour développer le robot wifi de mes rêves. Et révélation ! Ce n'est pas aussi dur que l'on pourrait imaginer.
Notre ami le robot
Au départ nous pensions utiliser un pc portable, lui mettre des roues et en faire un robot autonome. Nous avons réalisé :
- qu'un pc tel quel n'a pas d'entrée / sorties utilisables. Il faut se concocter une carte électronique pour gérer tout ça depuis l'usb et ça revient à prendre un marteau piqueur pour écraser une mouche finalement.
- qu'il est mieux de dissocier l'électronique logique de celle de puissance. Donc l'alimentation des servos doit se faire à part.
Par conséquent, nous avons abandonné l'idée du robot-pc et sommes passés à la carte fox, que nous connaissons déjà bien et qui bénéficie d'une multitude de ports d'entrée sortie :) Nettement plus intéressant pour un robot embarqué.
Nous étions initialement partis sur un robot à moteurs brushless (moteurs d'avions) pour la direction. La première étape a consisté à produire un signal PWM (signal carré servant à faire marcher les moteurs). Comme de gros débutants, nous avons essayé de produire un PWM depuis la carte fox. Premier échec, la fréquence de la carte fox ne nous permettait pas de descendre en dessous de 1 seconde de sleep pour générer notre signal PWM. Ce qui était fort embêtant, vu que la période du signal recherché est de l'ordre des millisecondes. Nous avons feinté et avons travaillé directement avec les cycles d'horloge. Miracle, cela a très bien fonctionné. Nous avions notre moteur qui démarrait comme on l'entendait... sauf que malins comme nous étions nous n'avions pas pensé qu'en lançant d'autres processus le programme ne pouvait plus fonctionner. Tout notre travail était donc réduit à néant.
Qu'à cela ne tienne, nous sommes passé au développement sur PIC18 pour gérer N signaux PWM en communiquant en série avec la carte fox. Malgré de nombreuses tentatives infructueuses, nous n'avons pas réussi à obtenir une communication série stable entre le PC et le PIC. Au grés de nos recherches sur Internet, nous sommes tombés sur la carte SSC-32 que l'on peut voir juste en dessous sur la photo.
Intérieur du robot avec une vue directe sur la carte SSC-32
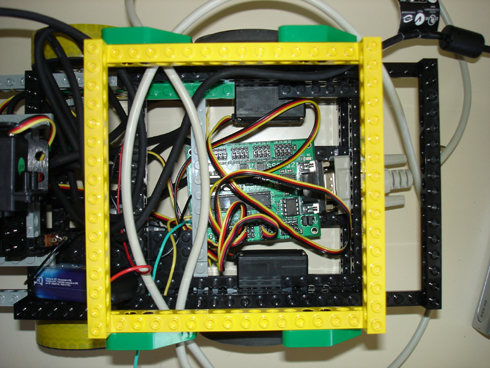
Cette petite carte (pour les fainéants) sort jusqu'à 32 PWM et peut communiquer avec un PC en série par commandes ASCII. Il n'y a qu'à l'alimenter. Déjà beaucoup plus simple ! Nous sommes passés également aux servomoteurs au passage, laissant tomber les moteurs brushless, plus complexes à utiliser et beaucoup plus chers. Mais ce n'est que partie remise ;)
Quand nous avons pu faire bouger notre premier servo, nous nous sommes attelés au client serveur entre la fox et le pc débarqué (un eeepc). Dans l'absolu rien de bien complexe, il s'agit d'un client/serveur basique en C qui envoie les commandes à la fox qui à son tour dialogue avec la SSC-32. Le plus ajouté étant la wiimote, que nous avons choisie pour commander notre robot. Après avoir luté pour compiler la librairie libwiimote nous avons réussi à transmettre les infos de la manette, du PC à la fox. Miracle ! Notre robot fonctionne :)
Je vous passe les photos de notre premier prototype en carton ! Nous nous sommes créé un chassis un peu plus digne en lego et avons installé tout notre bazar. Hormis le fait que les câbles (série et Ethernet) font 3m de long (on cherche des câbles beaucoup plus courts) et qu'il est encore alimenté par fils, le robot se déplace sans problème et bouge sa caméra.
J'oubliais ! Nous avons opté, bourrins que nous sommes, pour un routeur wifi branché en Ethernet à la carte fox. Il s'est avéré que la transmission du flux vidéo depuis le serveur vidéo de la fox descendait à moins d'une image par seconde lorsque nous utilisions une clé wifi usb ... assez embêtant. Pas de problèmes, nous avons carrément embarqué le routeur. Maintenant, il s'avère que certains routeurs peuvent carrément être utilisés comme systèmes embarqués avec un noyau linux. Donc à terme, si l'on souhaite optimiser, il faudra trouver une solution et virer soit la fox, soit le routeur pour ne pas avoir 2 fois le même appareil.
Donc actuellement nous travaillons sur l'autonomie du robot, c'est à dire la mise en place de batteries pour alimenter tout ça. Nous pensons peut être également nous procurer une FONERA 2.0 pour remplacer le gros routeur. Elle ne consomme que 5 V, comme la fox, ce qui nous facilite la tâche et est carrément moins encombrante. Ensuite il va falloir résoudre un certain nombre de bugs du robot, qui a la fâcheuse habitude de recevoir des commandes fantômes et donc à faire NIMPORTE QUOI. Cela semble venir de mon code \^\^ donc nous ne sommes pas perdus. L'étape suivante sera sans doute de se faire une interface sur le pc serveur débarqué et d'essayer de faire quelques bidouilles en traitement d'images pour que le robot repère un peu son entourage.
Voilà pour aujourd'hui. La suite au prochain épisode !
N'hésitez pas à venir réagir à cet article.
« Précédent Suivant »