Genesis
Genesis est mon premier robot. Il s'agit d'un robot mobile sans fil commandé par connexion wifi. Je l'ai développé dans le cadre de ma dernière année d'études à l'UTT avec un autre étudiant. Ses fonctions sont relativement simples.
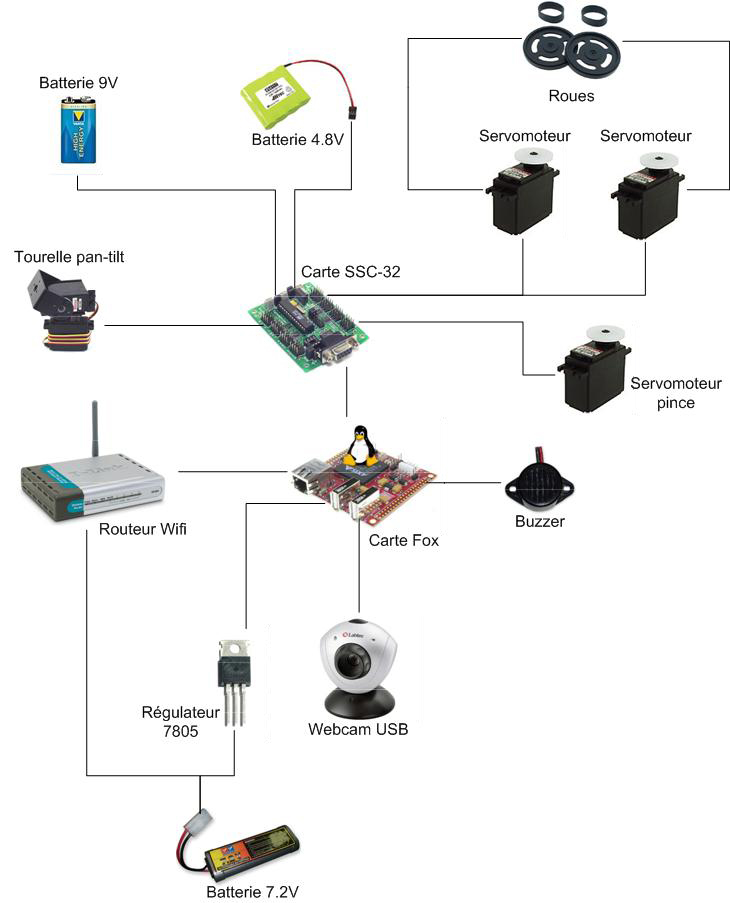
Le châssis est réalisé en lego, il est motorisé par deux servomoteurs continus commandés par une carte SSC-32. Une webcam est placée sur une tourelle pan/tilt, offrant une vision embarquée du robot et lui permettant d'avoir un champ de vision amélioré. La carte SSC-32 permet de commander les différents servomoteurs. Elle est reliée à la carte Fox en série, qui fait office de servo du robot. La carte fox centralise et dispatche les informations reçues de l'extérieur. En effet, cette carte est reliée en Ethernet à un routeur wifi. Un second ordinateur peut alors se connecter au robot par une simple application client/serveur. Le robot peut alors être commandé par le biais du clavier, d'un joystick, ou d'une wiimote. J'utilise à la fois les bibliothèques SDL et libcwiimote pour la phase d'acquisition de commandes.
A cela s'ajoutent une pince commandée par un servomoteur ainsi qu'un buzzer qui fait office de klaxon.
Côté droit du robot

Côté gauche du robot

Le schéma du robot est le suivant:
Nous avons réalisé différentes vidéos du robot: