Robert is alive ! Mais n'aime pas la moquette ...
Depuis le temps que j'en parlais, voici quelques nouvelles de Robert ! Qui se porte à merveille, sauf qu'il a bien des soucis d'adhérence sur pas mal de sols (carrelage, moquette, ...) Pas de chance, je n'ai que de la moquette et du carrelage chez moi :(
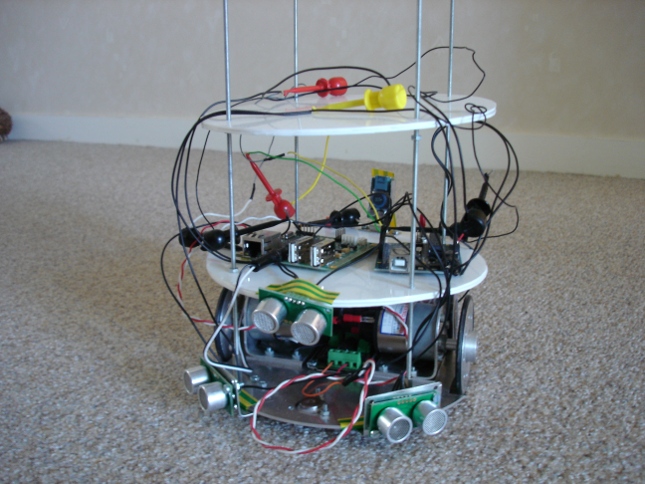
Donc, comme vous pouvez le voir sur la photo, il est un peu ... chevelu ! Disons qu'il porte bien son titre de prototype. Les cartes sont reliées à l'arrache pour l'instant, ça lui donne un certain cachet :P Bref, mes petites cartes sont enfin installées dessus. La carte fox (carte mère du robot) communique avec la carte Arduino (chargée des capteurs ultrasons) qui remonte les informations de distance. La carte Sabertooth, entre les moteurs, est quant à elle chargée de contrôler ces derniers. J'ai écrit un programme très basique (à l'occasion de Caprica 2010) qui donne son comportement au robot. Mais il s'avère qu'il n'est pas du tout au point. Mais grâce à lui je dispose au moins d'une première démonstration que voici :
« Précédent Suivant »